

1∶500 地形图测绘全野外成图工作量大,工期较长,成本较高。长期以来,为了减少工作量、缩短工期、降低成本,业内一直尝试采用航测法成图,并做了大量研究和尝试,但精度一直不理想。近些年无人机航摄因为使用方便,数据获取成本低、速度快,在1∶1000、1∶2000 等比例尺的地形图测绘、正射影像图生产等领域得到广泛应用,但在1∶500 航测法地形图测绘中,精度仍然不能完全达到规范要求。
本文通过对1∶500 无人机航测法成图过程中误差产生的来源进行分析,研究提高航测法成图精度的关键技术,选用速度慢、振动小、姿态好的电动差分无人机作为航摄平台,通过航线优化设计,建立1∶500无人机航测法高精度成图技术路线和工艺流程。
2 1∶500 航测法成图误差来源
(1)像片的地面分辨率和影像质量
在传统无人机航测法成图过程中,像片控制测量误差、空中三角测量误差、立体像对定向误差、立体采集过程中的位置判定误差等,会在作业过程中不断传递并积累,影响成图的最终精度。
不难发现,所有环节误差的产生都与像片的分辨率和影像质量有关。分辨率越高、影像质量越好,判读就越准确,误差也就越小,所以要提高成图精度必须首先提高像片的地面分辨率和影像质量。
(2)镜头畸变
无人机航摄采用的相机一般为非量测型全画幅相机,镜头畸变大,尤其是边缘部分。尽管可以根据相机畸变参数对像片进行畸变纠正,但纠正过程中会
产生纠正误差,且越往边缘,纠正误差越大。所以为了提高精度,应加大像片重叠度,尽可能使用像片中心部分的影像。
(3)像片外方位元素
一般的无人机没有配置高精度惯导装置,仅采用普通GPS 进行定位导航,所以在相机曝光同时记录的位置数据误差很大,需要后期完成大量的像片控制测量后,才能进行空中三角测量。为了减少像片控制测量工作量及后继工序的误差累积,应尽可能提高曝光瞬间像片的外方位元素精度。
3 高精度成图关键技术
根据误差来源分析,要提高成图精度,有必要采用一些关键技术手段和方法,以增强影像质量、提高影像地面分辨率、减小镜头畸变影响、提高像片外方位元素精度。
(1)事后差分GPS
事后差分GPS 系统包括基站GPS、移动站GPS 和事后差分解算软件。基站GPS 架设在已经测定精确位置的点位上进行长时间连续观测。移动站GPS 搭载在无人机上,其天线中心位置与相机中心位置经过量测标定。移动站在飞行过程中连续观测,并完整记录相机曝光瞬间给出的曝光时间戳信号。航摄完成后,事后差分解算软件根据基站精确位置数据、基站连续观测数据、移动站连续观测及曝光时间戳数据进行事后差分解算,获得每张像片的高精度位置坐标数据。
(2)相机曝光与移动站GPS 记录时间戳高度同步相机曝光的真实时间与移动站GPS 记录的时间戳总会有些误差,需要采用一定的技术手段最大限度减小这个差值,尽可能实现相机曝光时间与移动站GPS 记录的曝光时间戳同步。
(3)增强像片影像质量
像片影像质量直接影响影像判读准确度,对1∶500 测图尤为重要。所以需要选用成像质量较好的相机,选择空气洁净、光照充足的时间段,优化相机参数后进行航摄,以获得影像质量较好的像片。
(4)适度提高影像地面分辨率
影像分辨率越高,在航测法成图的各个环节中对影像的判读精度就会越高,但是航摄效率会下降。根据《数字航空摄影规范 第一部分:框幅式数字航空摄影》,1∶500 航测法成图要求航摄地面分辨率小于0.08m,在兼顾航摄效率的同时为了提高成图精度,根据经验确定地面分辨率为0.04~0.05m。
(5)减小像点位移
像点位移会降低影像解析能力,影响判读精度。规范规定像点位移一般不应大于1 个像素,最大不应大于1.5 个像素。由像点位移公式δ=v×t/GSD 可知,要减小像点位移就要降低飞行速度,缩短曝光时间。所以需要在确保影像质量的情况下将曝光时间缩到最短。根据经验,像点位移小于1/3 个像素时可保证影像解析能力。
(6)提高像片重叠度
提高像片航向重叠度和旁向重叠度,有利于减少对像片边缘影像的利用,最大限度降低像片畸变纠正过程中的影像纠正误差。规范规定航摄重叠度一般应为航向60%~65%,旁向20%~30%。为了提高成图精度,可加大重叠度。根据经验,航向重叠度取70%~75%,旁向重叠取60%~65%可显著提高空中三角测量平差精度。
(7)增加构架航线
构架航线与正常航线垂直布设,起高程控制点作用,有利于减少像片控制点量测数量,增强区域网模型之间连续性,提高空中三角测量平差精度。构架航线结合事后差分解算提供的像片高精度POS 数据,能够实现稀少像片控制点甚至无像片控制点完成空中三角测量。
4 1∶500 无人机航测法高精度成图试验
4.1 试验流程及飞行区域选择
本试验过程包括飞行区域选择、航摄设计及相机检校、航摄作业、事后差分解算、空中三角测量、检查点立体量测、检查点野外量测、精度评定等步骤,具体试验流程如图1。
选择的试验区域位于四川省简阳市,面积约3km2,整体地形为丘陵,高差约80m。区域内有居民地、厂房、道路、平整地块、水系、植被等地物,对于本次试验具有典型的代表意义。
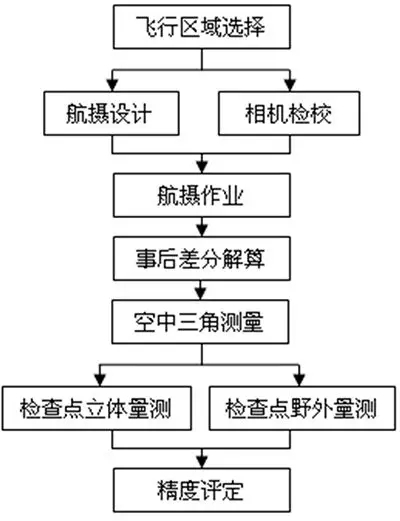
图1 试验流程
4.2 航摄设计及相机检校
(1)航摄飞行平台的选择
航摄飞行平台应装备高精度差分GPS 系统,实现相机曝光时间戳的精确记录;采用电力驱动,实现慢速、稳定飞行。CW-10 电动复合翼垂直起降无人机自带高精度差分GPS、引闪器,采用大容量锂电驱动,飞行振动小,巡航速度20m/s,在曝光时间不长于1/1600s 时,可以保证像点位移在1/3 像素以内,是本试验较为理想的飞行平台。
(2)相机选择及参数标定
相机选用3600 万像素全画幅Sony ILCE-7R 机身,像元尺寸4.88u,搭配成像质量较好的蔡司35mm 定焦镜头。相机的内方位元素和畸变参数经精确标定。
(3)航线规划
设计地面分辨率为0.04m,航向重叠度70%,旁向重叠度60%,构架航线垂直于主航线,位于测区内离主航线两端头4 条基线长度的位置,航高比主航线高50m。规划航线如图2,东西方向为主航线,南北方向为构架航线。

图2 规划航线
4.3 无人机航摄作业
选择合适天气,测定基站GPS 坐标,完成无人机航摄作业,完整下载航摄像片数据、基站GPS 数据、移动站GPS 数据,并检查数据完整性及可用性。
4.4 事后差分解算及空中三角测量
(1)事后差分解算
利用事后差分解算软件对基站坐标数据、基站GPS 数据、移动站GPS 数据、机载POS 数据进行联合解算,得出精确的影像POS 数据,平面坐标系为CGCS2000,高程系为椭球高,也可以加上高程异常,使用正常高。
(2)空中三角测量
选择GodWork 软件作为空中三角测量工具。整个空三过程包括:原始数据载入、自动相对定向、自动绝对定向、平差和输出结果。这个过程只需要少量的人工干预。
4.5 精度检测
(1)检查点立体量测
将空三结果导入到全数字摄影测量系统,在立体上量测检查点三维坐标。
(2)检查点野外量测
采用天宝RTK 到野外实地测量检查点三维坐标。
(3)精度对比
以检查点野外量测为基准,立体量测相对野外量测的平面位置中误差、高程中误差分别按下面公式计算。
式中:
m1——检查点中误差,单位为米(m);
Δ——检查点野外实测值与立体观测值的误差,单位为米(m);
n ——参与评定精度的检查点数(每幅图20~50个)。
随机抽出两幅图进行精度检测。每幅图检查点个数为33 个,总计66 个,并均匀分布。检查点统计计算结果见表1。平面位置中误差为0.071m,最大误差为0.158m;高程中误差为0.069m,最大误差为0.129m。小于2 倍中误差的检查点有10 个,小于1 倍中误差的检查点有56 个。
表2、表3 分别为GB/T 23236-2009 《数字航空摄影测量空中三角测量规范》、GB/T 14912-2005《1∶500 1∶1000 1∶2000 外业数字测图技术规程》关于1:500 比例尺的精度要求。对比表1 和表2、表3,试验实现了1∶500 无人机航测法高精度成图的试验目标。
表1 检查点误差统计表

5 1∶500 无人机航测法高精度成图的工程应用
经试验验证后,利用本技术方案实际应用于广安市溪口镇1∶500 地形图测绘。测区位于山谷地带,面积2km2,中央地形较平,为丘陵地形,四周属于山地地形,利用本技术方案完成了航飞、POS 解算、空中三角测量、内业立体测图。精度检测时随机抽取4幅图进行精度检测,检查点共84 个。经统计,平面中误差±0.09m,高程中误差±0.08m,平面及高程精度均满足相关规范要求。
6 结束语
在当前差分GPS 技术、无人机技术、相机技术不断进步的过程中,通过科学的优化技术路线,1∶500无人机航测法高精度成图试验成功并在实际工程中得到应用,完成了业内追求多年的夙愿,顺利实现1∶500 地形图测绘工期缩短、成本降低的目标。虽然因植被覆盖无法看见的地物测量、房檐改正等工作,仍需要野外实地测量,航测法成图不能完全代替野外作业,但这并不能影响1∶500 无人机航测法高精度成图在实际工程应用中的重要现实意义。
上一篇:倾斜摄影测量技术在三维建模中的应用
下一篇:分享一款航拍照片去雾及图像增强软件











