

此方法为基于TerraSolid的试验。
数据准备
点云数据为经过处理的机载激光数据。
打开数据
在microstation中加载terrascan模块。
点击file,readpoint加载点云。

点云分类
- 分离地面点
在view展示菜单中可以根据不同属性显示点云,classify为分类工具
点击classify,子菜单中选择分离地面点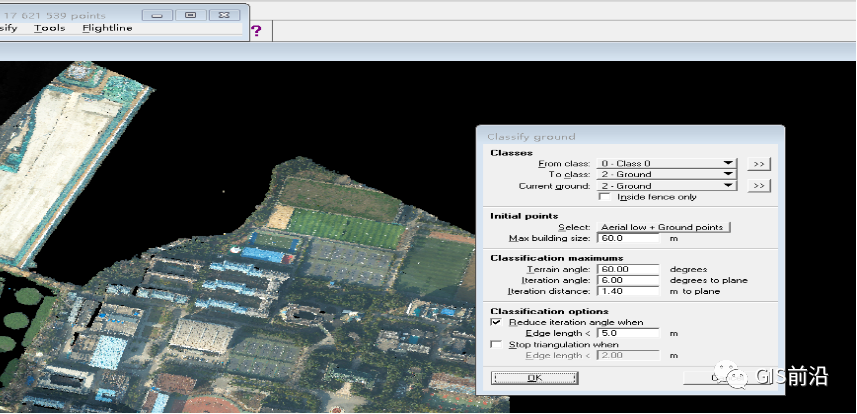
Class为点云图层。刚开始默认所有点云都在0层,我们需要从0层分类到ground层,首次分类select选中上图所示,输入最大建筑物尺寸。
下面为地形坡度,迭代角度与迭代距离,距离一定角度越大,地形越陡峭,角度一定,距离越短越陡峭,反之则为平坦,根据地形设置对应参数。
最后为在边缘处是否减少迭代的选项。
设置好之后点击OK,以下为分类结果(粉色点)。
图片
2. 分离建筑点
在classify中选择分离建筑物,以下依次为点云层,分类规则,建筑物最大尺寸,以及屋顶的高程限差,附加选项为是否使用回波信息。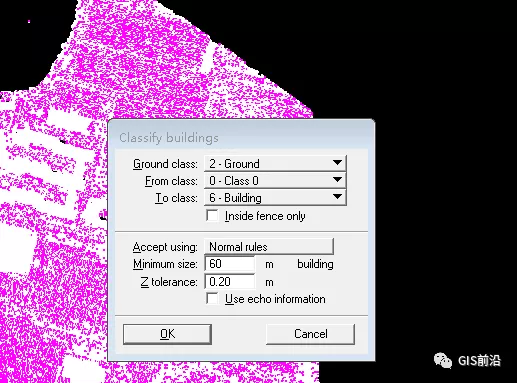
以下为建筑物分离结果(蓝色点云),如果对分类结果不满意可以手动细分。
- 分离植被点
在classify中选择detect tree,点击确定。
图片 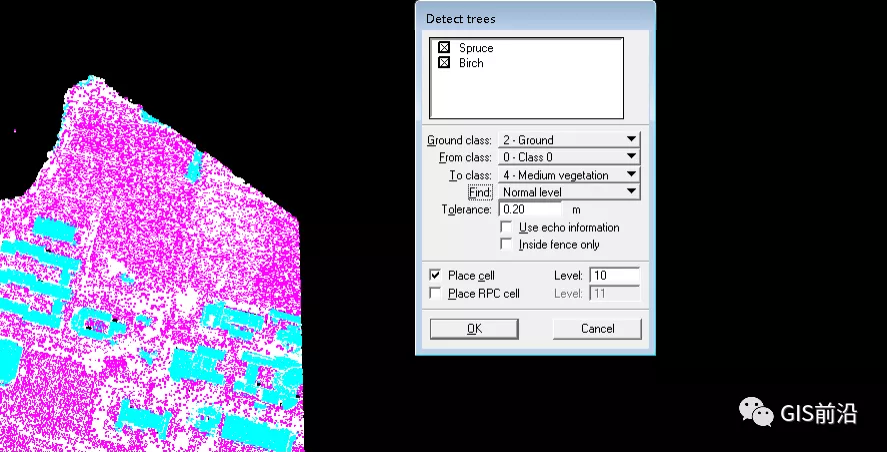
分类完成后查看分类结果。切换到高程显示,可以看到植被已经分离,并自动生成了植被矢量。
点击file保存dxf。
4. 提取建筑物轮框
在工具中运行宏,添加矢量化建筑,参数设置参考建筑物点云提取,选择路径,运行,提取完成后生产text矢量文件。生成结束后如右图所示。

- 打开矢量
在Global Mapper中导入建筑物轮廓txt,植被矢量dxf,以及las数据。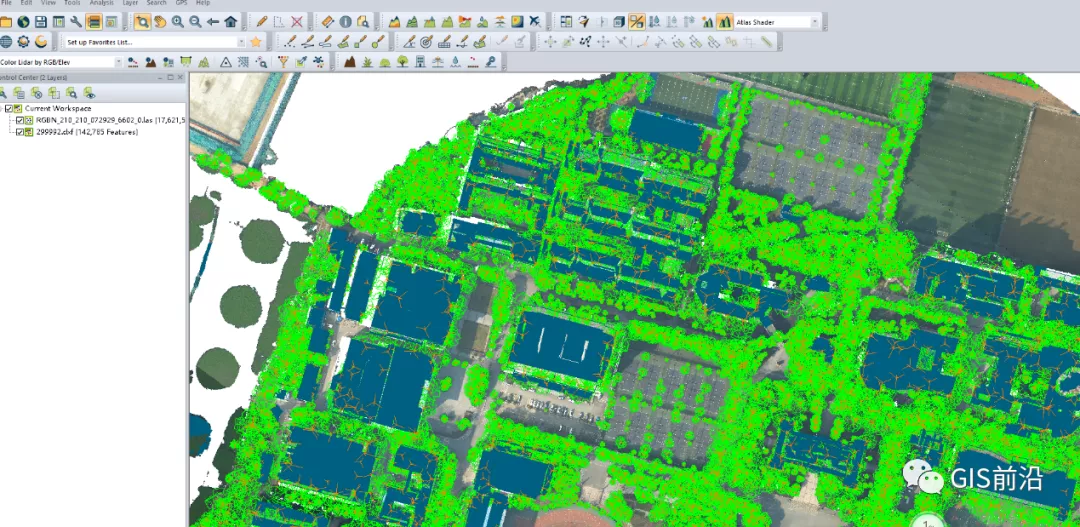
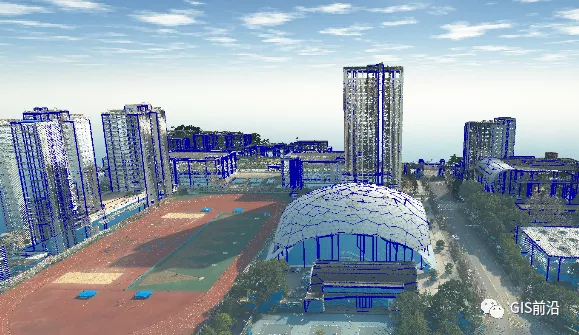
在3D视图中查看
关闭植被查看轮廓提取情况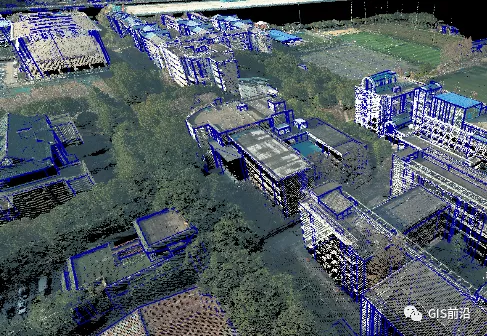
结语
倾斜摄影测量常用的单体化方法为拉升建筑物结构,构造几何体,再进行贴图,如果提取矢量足够准确,只需要少量修改就能得到建筑物准确轮廓的话,将大大节省单体化成本。
来源:https://blog.csdn.net/qq_43173805/article/details/119999400成都途远GIS是一家专业致力于无人机航空摄影测绘、航空数据处理、GIS地理信息系统研发、数字孪生城市制作、数字沙盘模型等业务的创新型科技公司,为您提供一站式地理信息服务。











