

无人机航测具有机动灵活、高效快速、作业成本低、适用范围广、生产周期短等特点。近年来,无人机行业发展迅猛,随之衍生的新兴行业对传统行业产生强大冲击。在农林植保、电力巡线、空中监察、影视航拍、航空测绘、公安反恐、高速巡检、无人机编队表演等广泛应用。
作为传统测绘从业者,深知测绘行业之艰辛。希望通过本篇的学习,能够帮助大家在野外作业时减轻工作量,加快作业效率。时代在进步,科技在发展。我愿意和大家一起到中流击水,浪遏飞舟。
无人机航测系统配置及流程图(多旋翼版)
1
外业子系统
补充说明:Altizure软件及其网站因为公司运营原因已在2020年底正式关闭,软件依然可以使用但是不再更新,未下载的可以在网上搜索到免费安装包。
2
内业子系统
3
航测流程图
制定飞行计划
现场踏勘及航线规划
实施飞行
像控点采集
外业成果检查与处理
内业出正射影像、三维模型
测区概况
测区对象为西华师范大学新校区一期,范围包括校门、美术楼、图书馆、教学楼、办公楼、化工楼、校医院、篮球场。
南充市位于四川盆地东北部,地处嘉陵江中游,介于北纬30°35’31°51’,东经105°27’106°28’之间,西华师范大学就座落于南充市郊的西山脚下。西华师大新校区是世纪之交时学校征地所建,由同济大学建筑设计研究院规划与设计,占地2000余亩,建筑面积90余万平方米。

航线规划
1
航线规划软件介绍
图片Altizure深圳珠科创新技术有限公司开发的一款免费的实景三维建模软件,具有自动规划航线功能。因为公司运营的问题,软件不再更新,网站也已关闭,需要的朋友可以在网上下载旧版本继续使用。推荐大家使用另外的免费航线规划软件 Pix4dcapture、航飞精灵、DJI GS PRO等,操作流程和设置大同小异,可以参照以下操作。
2
航线参数设置
2.1范围线
图片此次测区范围为392m x 390m,平均高程约为245m。使用Altizure航线规划软件ios版,此版本还具有导入kml功能,将测区的kml导入APP,能够更合理的规划航线,节省电量等。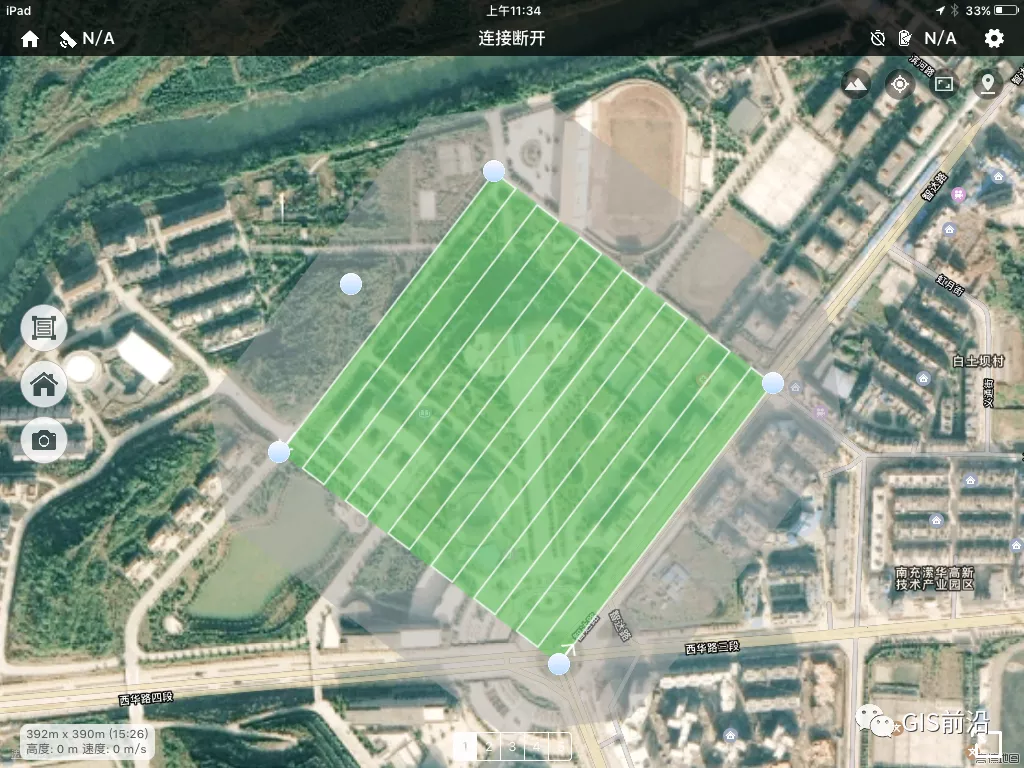
2.2飞行高度
图片测区相对高差在40米左右,为了保证飞行安全和满足精度要求,将飞行高度设置为100米。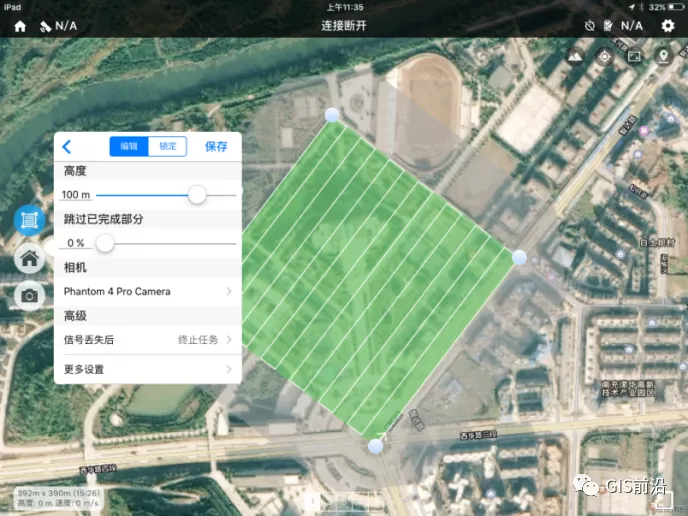
2.3重叠率
图片航向重叠率一般设置在80%左右;旁向重叠率通常设置范围为60%-80%,需要三维建模请选择高重叠率来确保模型质量。本次测区我们将航线重叠率设为85%,旁向重叠率设为80%。(如果只出正摄影像,可以根据要求适当提高飞行高度和降低旁向重叠率,能够扩大作业范围,提升作业效率)

2.4航线
出正摄影像只需要飞第一条航线(镜头垂直向下),建立三维模型需要飞完五条航线,也有飞环形航线提高效率节约时间的。
3
构架航线
构架航线又叫作控制航线,主要是指在测区范围内加飞的若干条与测图航线近似垂直的航线。其主要作用是在基本航线的两端起到控制点的作用,减少测区内地面外业像控点的布设工作量,增强区域网模型之间的连续性,提高加密平差精度。
4
飞行安全
注意测区是否属于禁飞区,测区内有无高层建筑物,信号塔,高压线,以此来确定合理的飞行高度。选择地形平坦,开阔,相对位置较高的地方(如小山丘,平房楼顶)作为起飞点,并且起飞点需要考虑航线最远处的信号传输问题。合法飞行,申请空域!
5
实施飞行
起飞前,先用DJI GO 4 连接无人机,检查飞行器状态,刷新返航点(重要)。飞行中,应该走到空旷的无遮挡的地方将遥控器天线对准飞机的位置,以防止断开信号,导致无人机中断任务返航。
6
成果检查
手工筛选掉漏浆,方向不对,相机过曝、欠曝等不符合要求的照片。大疆无人机拍摄的照片自带pos信息(wgs84坐标系统),右键属性→详细信息可以查看照片经纬度及其它信息。
像控点
像控点是摄影测量控制加密和测图的基础,因此,野外像控点目标选择的好坏和指示点位的准确程度,直接影响成果的精度。本测区采用CGCS2000坐标系统,高斯三度带投影,中央子午线为105°,高程系统为1985高程。
1
像控点的布设位置
图片1.1一般是在测区的四个角和中间位置(但不要太靠近边缘,以免拍不到)。
1.2如果需要多架次飞行或者带状测区的,尽量保证不同架次之间的重叠区域有像控点。
1.3理论上像控点最低要求为三个,但是建议做五个以上(三个点只能组成一个三角形,而五个点却可以组成十个三角形)。测区越大,需要布置的像控点越多。
A.预铺设法
图片飞行前在测区范围内预先铺设像控点,常见的有标靶,油漆,石灰等。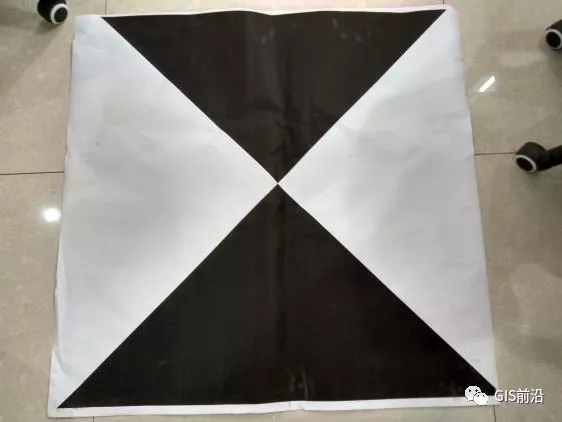
B.后采法
图片 在飞行任务完成后,通过拍摄的照片来寻找地面特征点作为像控点(如:公路叉,水泥坝,停车线)。

2
实地采集
图片因为本次测区地面特征点较多,所以使用后采法采集像控点,个数为五个,均匀分布于测区。用RTK多次采集地面特征点,取均值。当然以上两种方法可以同时使用,效果更佳。
像控点成果处理
RTK采集的数据一般导出为南方cass格式dat文件,而pix4dmapper软件要求的是txt,scv文件。
新建TXT文本文件复制粘贴数据,得到我们需要的txt格式的像控点文件,当然你也可以使用scv格式。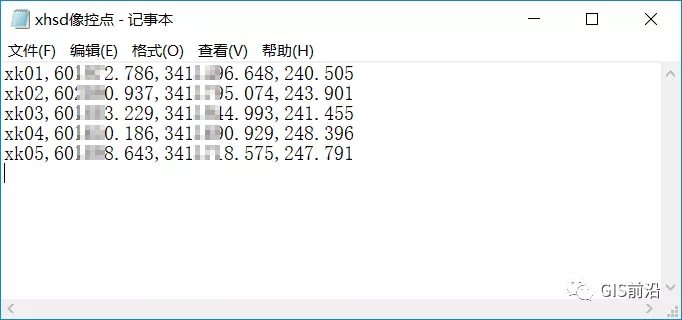
正射影像生产
1
Pix4Dmapper软件介绍
Pix4Dmapper来自于瑞士的pix4d公司,是集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件。Pix4Dmapper无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、精确的二维地图和三维模型。
此次教程使用Pix4Dmapper试用版,其它常用出正摄软件还有Photoscan UASMaster 等。
2
建立工程
2.1打开软件,建立一个新项目。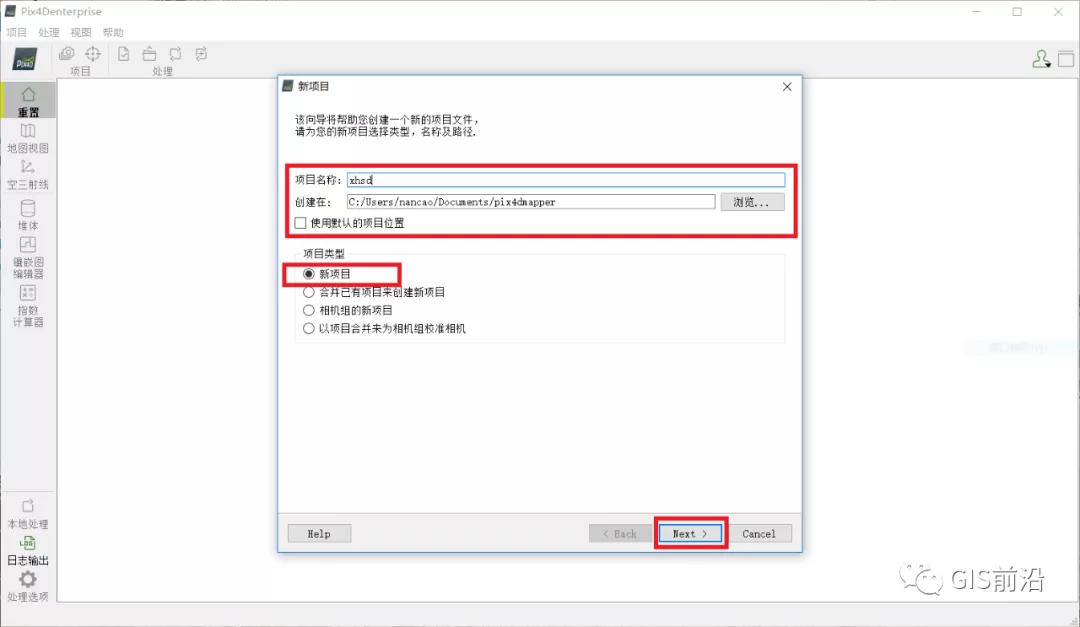
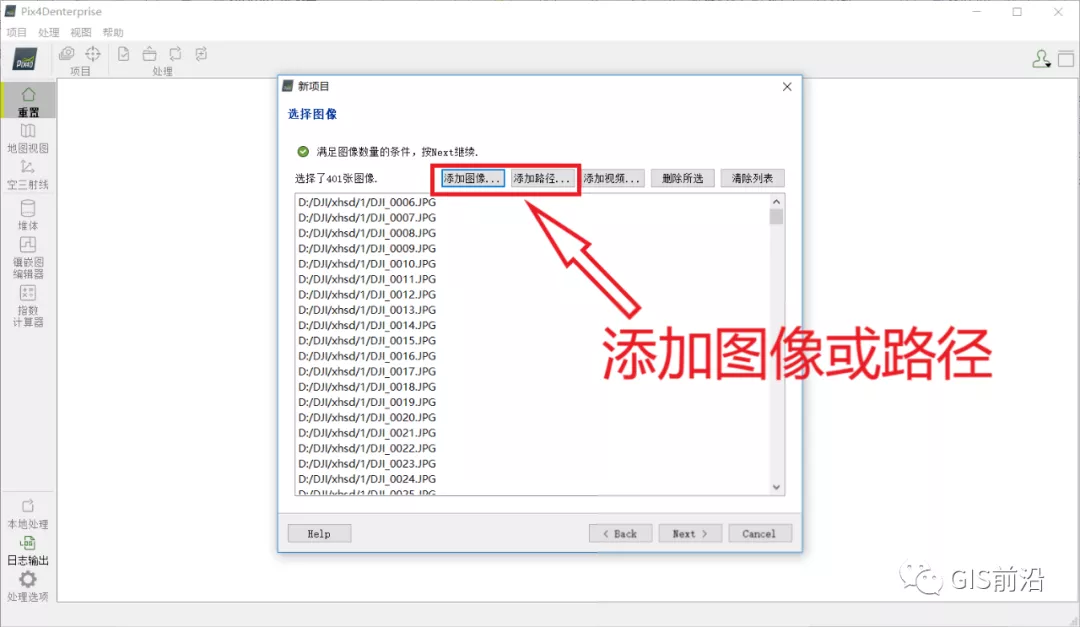
2.2导入照片,点击下一步
可以选择照片,也可以直接选择路径。
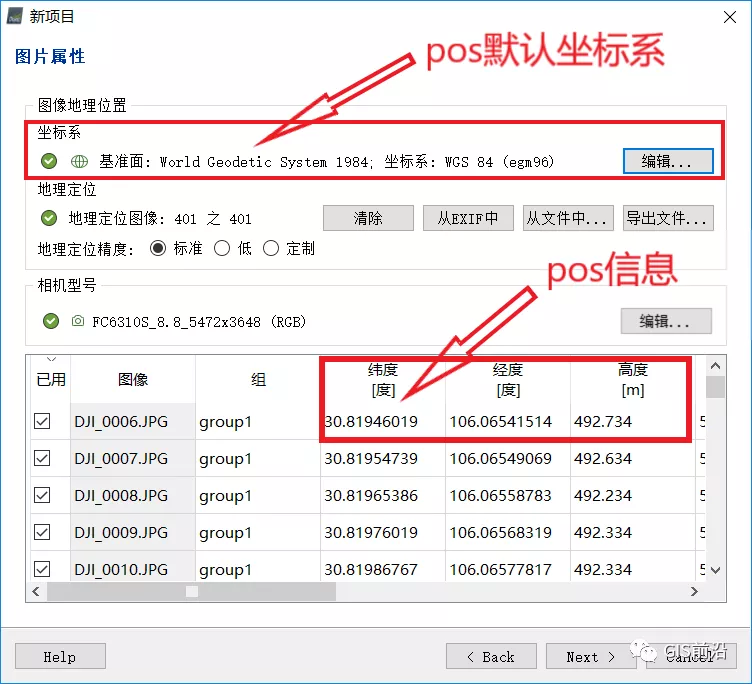
2.3图片属性,默认就好,点击下一步(pos信息也可以从文件中导入,比如上ppk的固定翼的pos信息)
2.4选择输出坐标系
选择输出坐标系时,一定要注意和像控点坐标系保持一致。如果像控点坐标系和你需要的成果坐标系不一样,那么需要进行坐标转换。如果像控点是独立坐标系,则选择任意坐标系。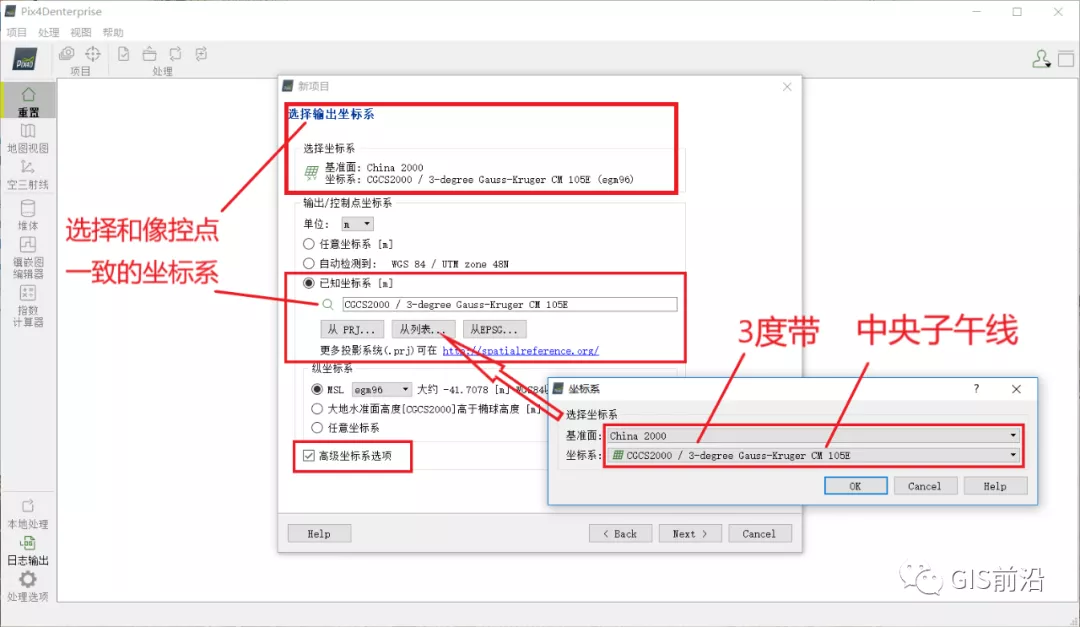
2.5选择模板
选择标准模板下的3D Maps出高质量正摄影像图。在野外作业时,为了现场检查图像的质量,是否需要补拍等,通常的经验是选择快速检测出一个低质量的快拼图,以此来检验。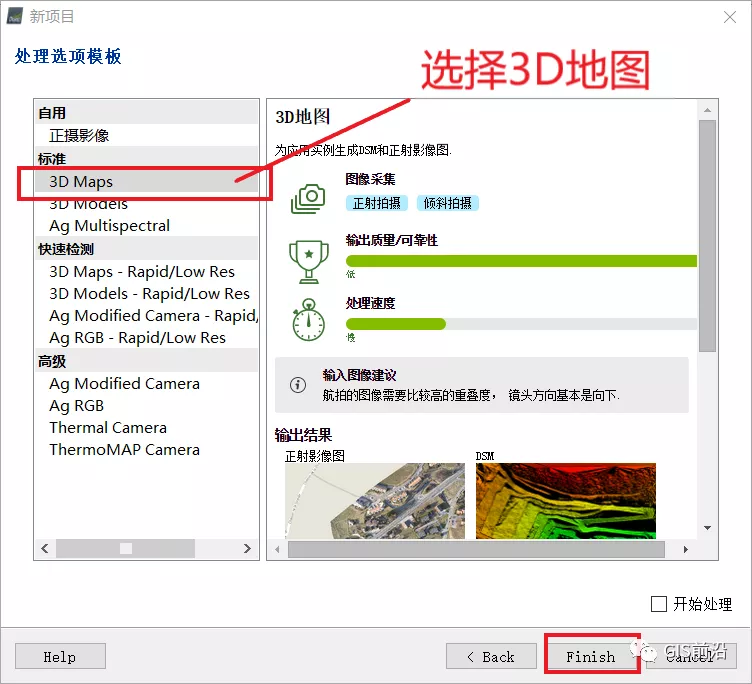
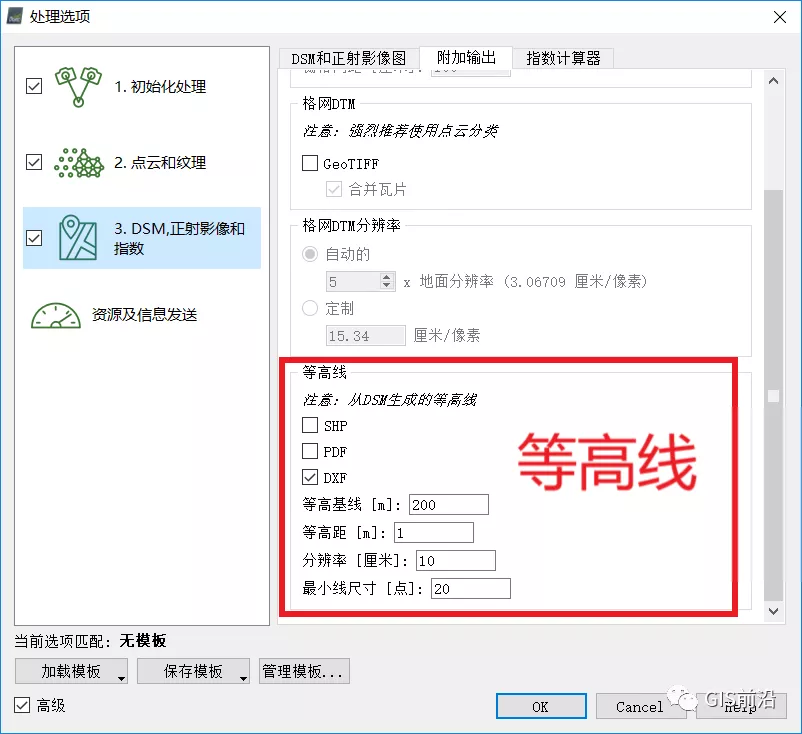
2.6处理选项
第一步 初始化处理
图片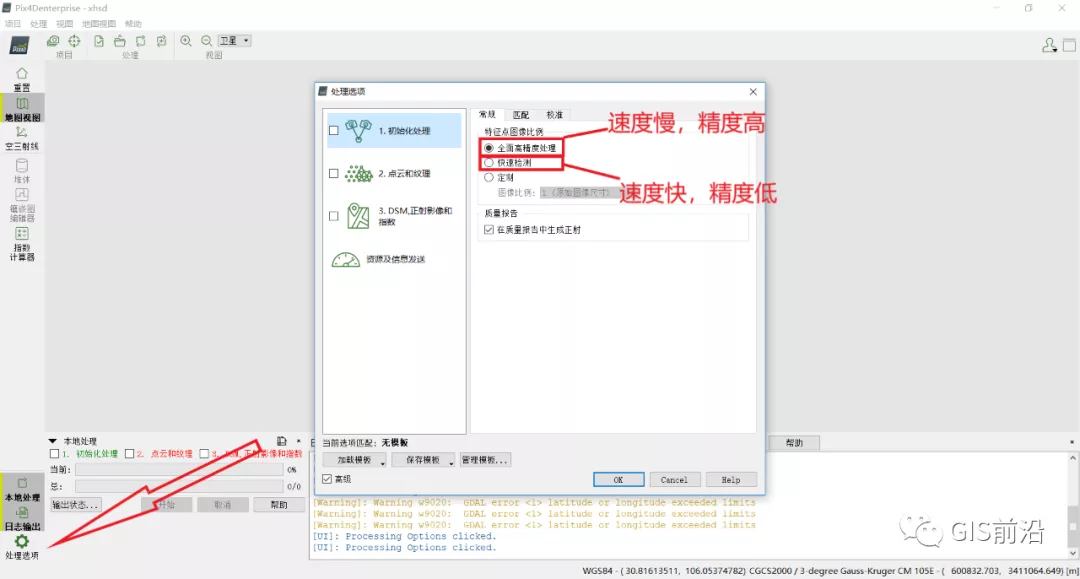
第二步 点云和纹理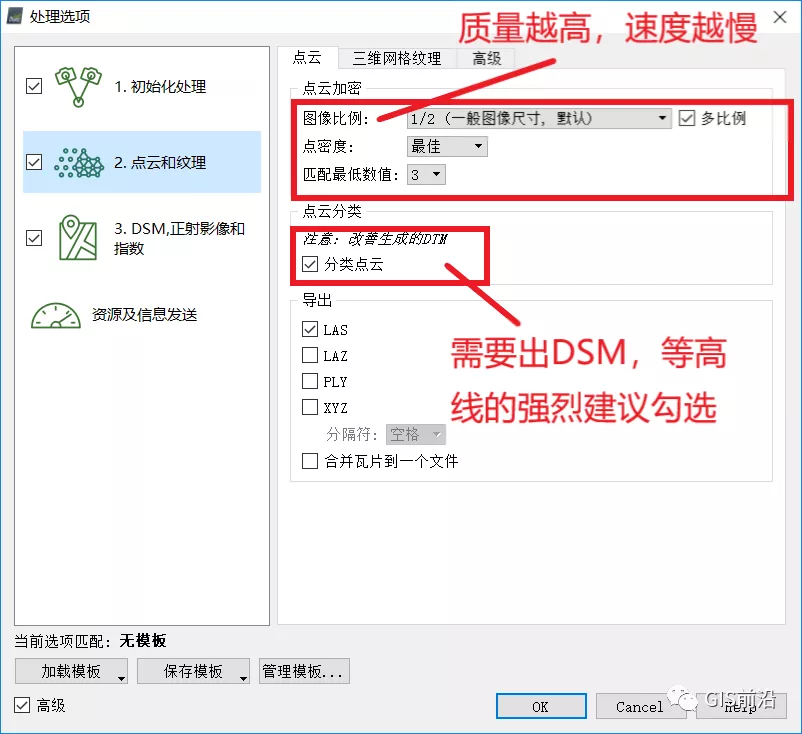
第三步 DSM,正射影像和指数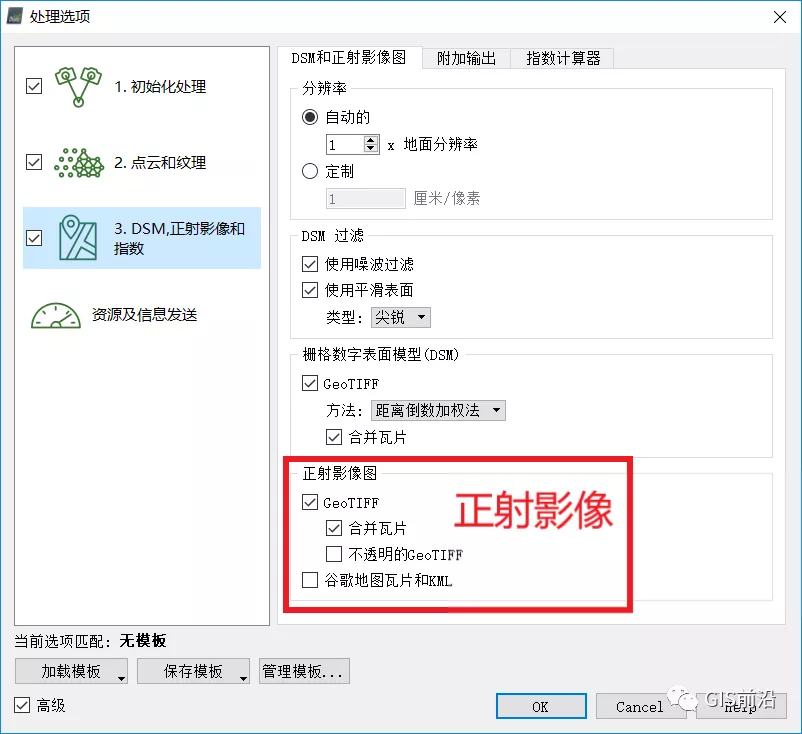
像控点刺点
3.1平面刺点法
点击项目→GCP/MTP管理→导入控制点→选择txt文件→OK→平面编辑器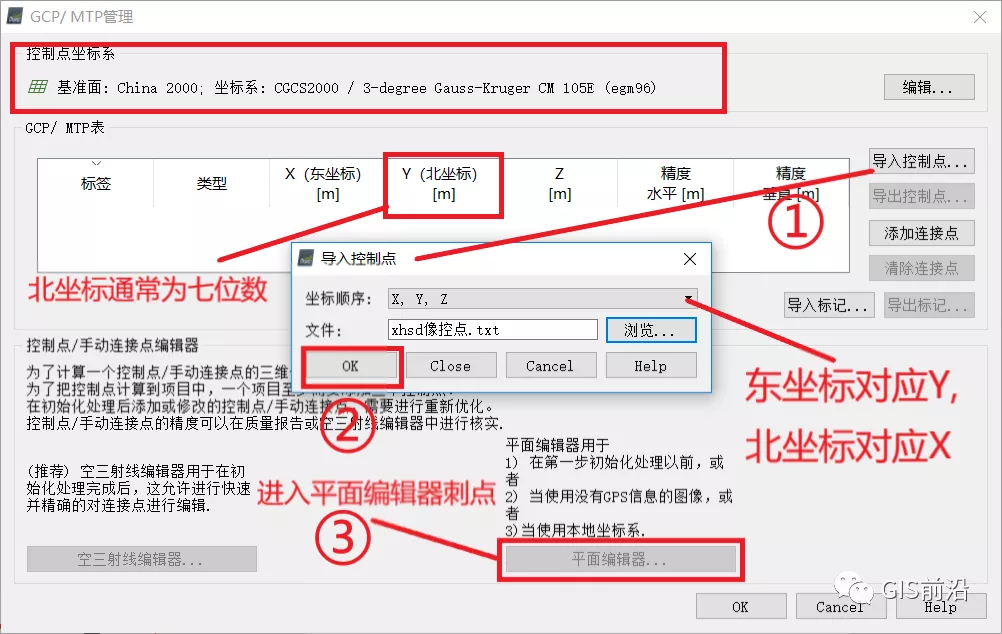
选择要刺的像控点→点击要刺的照片→单击刺点(每个像控点一般刺5-10张)
图片 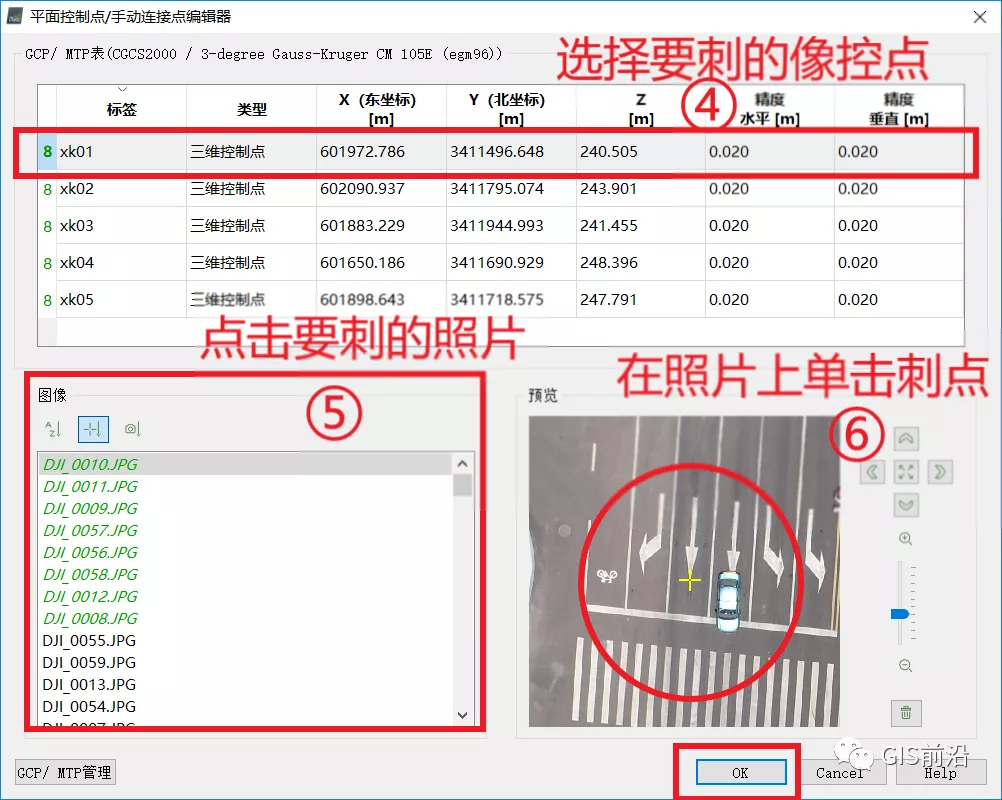
刺完后点击ok,开始运行程序第一,二,三步直接出成果。
3.2空三射线刺点法
空三射线刺点法适用于第一步初始化处理完成后,可以进行快速并精确的刺点。(推荐使用方法)
点击项目→GCP/MTP管理→导入控制点→选择txt文件→OK→空三射线编辑器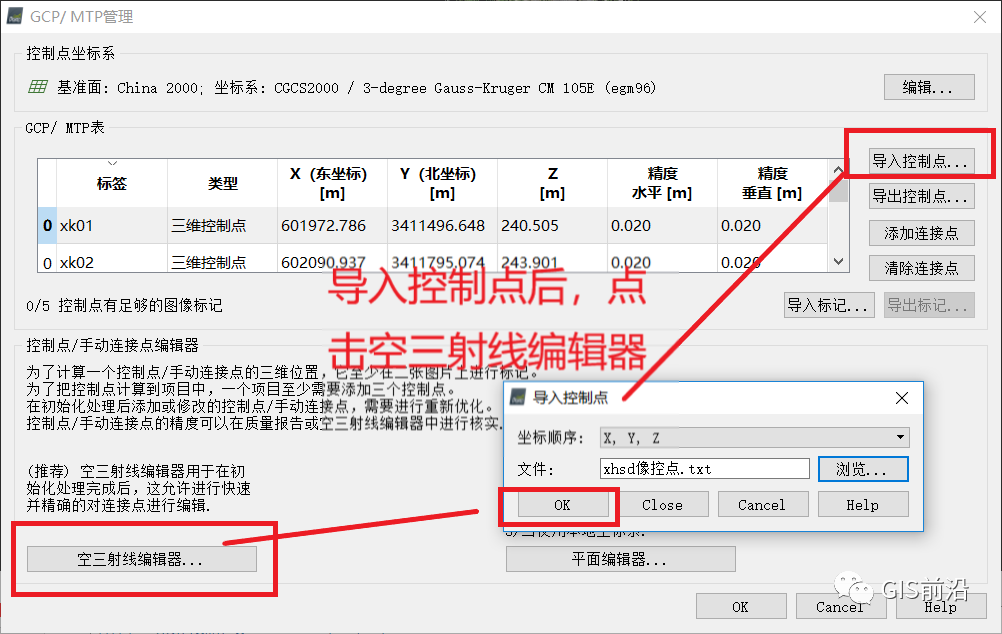
选择要刺的像控点→单击照片刺点→使用→重新匹配并优化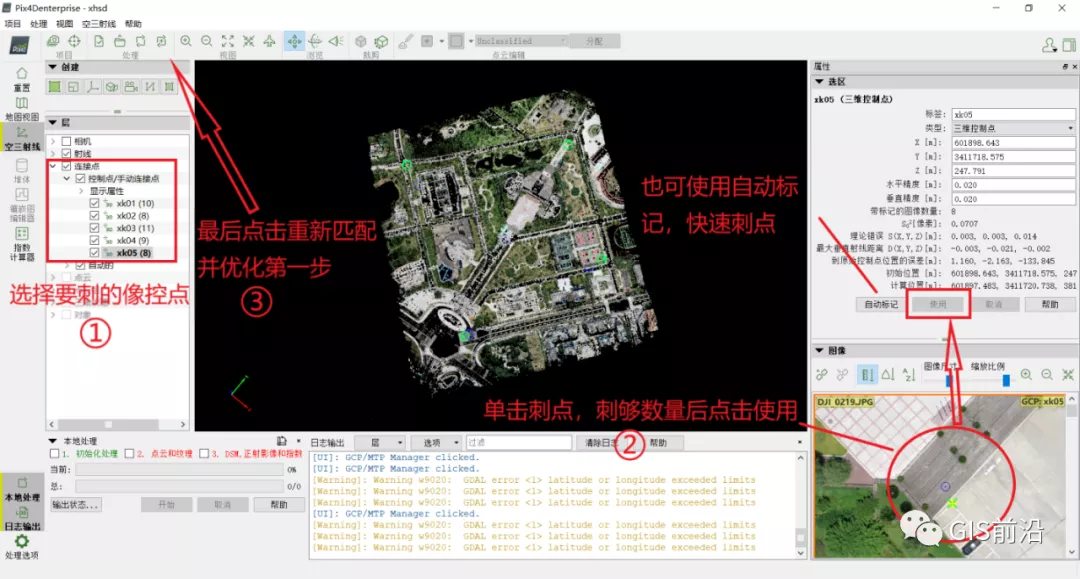
重新匹配并优化完成后→运行第二,三步直接出成果。
4
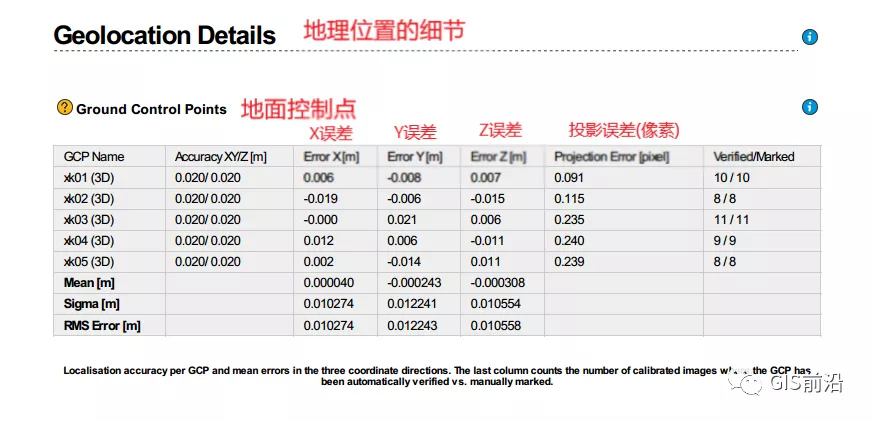
质量报告
每一个步骤完成,都会生成一个质量报告。需要注意的有以下几个地方: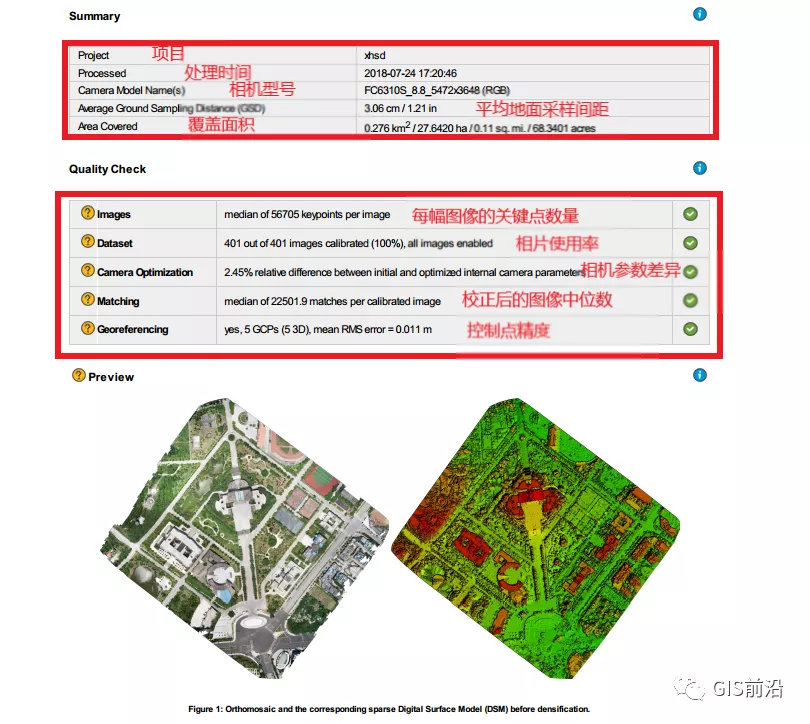
5
成果
5.1点云
图片
找到点云文件,用Global mapper打开点云,可以进行点云自动分类、抽稀,出等高线等。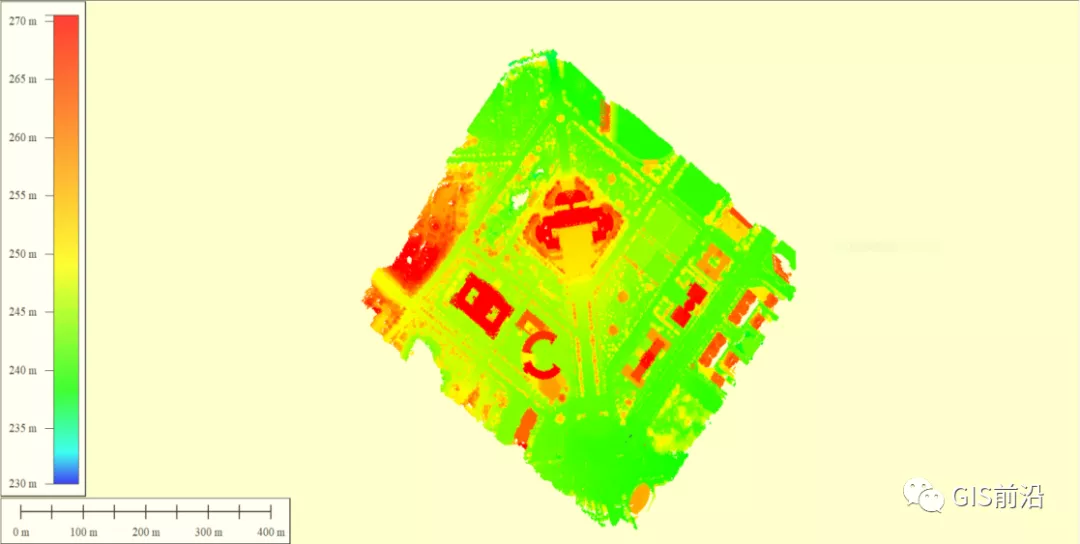
5.2等高线
图片
用Pix4d生成dxf格式的等高线,使用南方cass软件打开即可。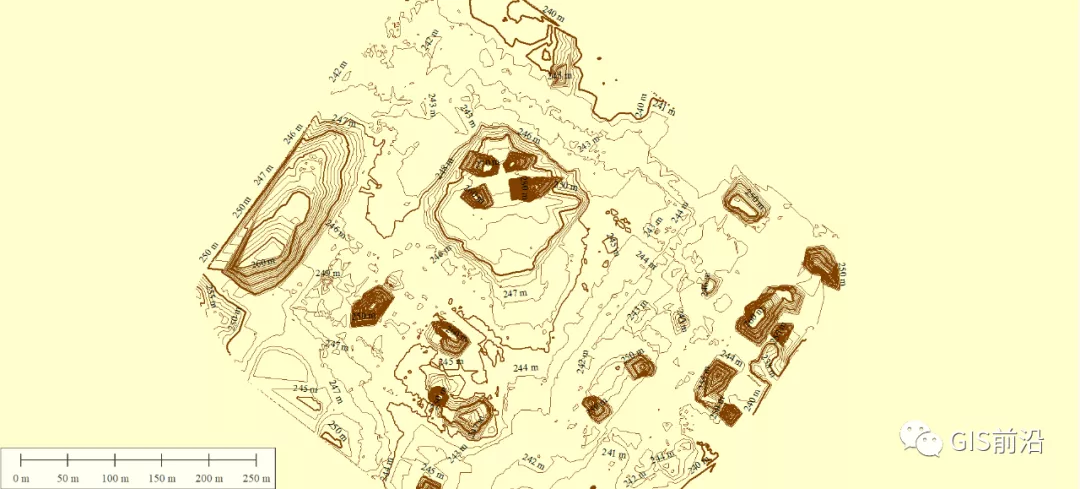
5.3正射影像
用Pix4d图片生成的正射影像为tif格式,自带坐标信息。打开南方cass软件,加载影像导入CAD插件,直接打开即可。
来源:https://blog.csdn.net/qq_43173805/article/details/120187351
上一篇:CAD等高线数据在ArcGIS转DEM
下一篇:按图幅号批量裁剪和命名影像操作流程











