

随着GNSS及INS的发展,精确的即时定位及姿态确定成为可能,自此激光雷达LiDAR得到了迅猛发展现,已广泛应用在测绘,林业,电力,水利,市政,公路交通,铁路交通,古建保护,逆向建模等。
本文是微辣火龙果张老师团队在广东省某地开展测量勘察项目的总结。此次项目时间紧任务重,测区共计2.5平方公里,需要得到测区范围内1:1000DLG。测区范围内地势起伏不大,但树木遮盖度大,普通数字航空摄影和传统测量难度大,项目以飞马D2000为飞行平台,搭载D-LiDAR2000激光雷达模块,凭借激光雷达多回波特性穿透植被冠层,提取高精度 DEM,进而快速生成地形图,成果质量满足项目要求,工作效率提升40%-60%.
1
飞前准备
无人机激光雷达航测与可见光倾斜摄影类似,在起飞之前需要对测区范围进行巡视,检查高压线等高的地物与航线的空间位置关系,确认安全后设置120米航高进行变高仿地飞行,航线规划、像控布设和测量。



本项目采用的D-LiDAR2000激光雷达模块,是飞马机器人公司适配D2000无人机的激光雷达模块,采用TOF测距模式,回波数为三回波,测距精度+_2cm,标称精度5cm@50,高差定位精度3cm,航向角精度0.03°
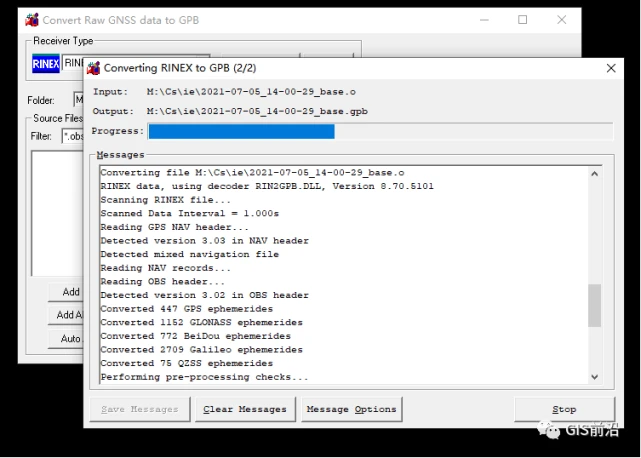
外业飞行作业获得的点云数据是基于千寻CORS,CGCS2000坐标系。经常使用千寻的测绘同行都知道,千寻CORS测得的高程是大地高,而本项目成果要求坐标系是CGCS2000坐标,1985国家高程基准。因此我们外业采用千寻CORS和广东省CORS,在测区外围和测区内实测了12个坐标控制点对,求算坐标转换七参数,把成果数据转换到项目所需的目标坐标系。
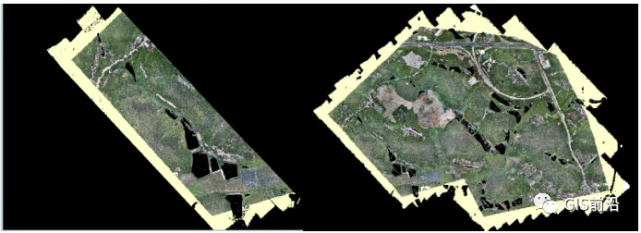
普通激光所获取的点云是没有地物颜色信息的,为了后期更便于操作和使用,我们需要对点云进行附色,这里用到的是测区正射,所以在规划和航飞时需要加上测区正射的部分,边缘区域正射航线需要比激光点云范围多一条航线,以保证边缘附色完整。其他方面前期准备与航测相差不大,这里就不做赘述。
2
航飞作业
航飞过程大同小异,选好合适起飞点后,按照预定航线飞行,与普通航测不一样的是由于原理是激光回波,并不局限于光照强度等因素影响,即阴天或晚上也可以作业,有利也有弊,这也使得大面积水面或地物表面覆盖太多水迹会影响成果,避开雨天就好。

3
内业数据处理
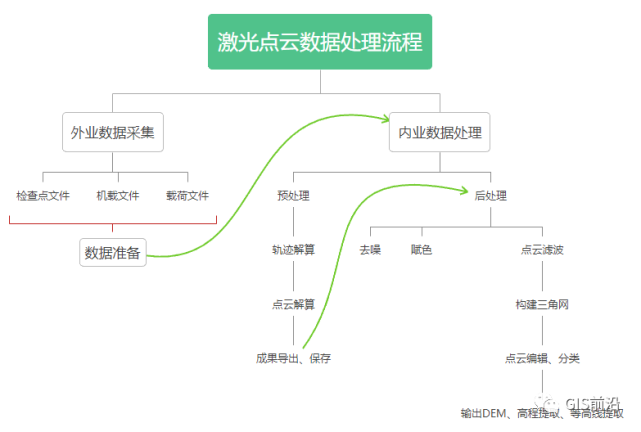
数据处理主要用到飞马无人机管家中的智理图、智激光、智理图模块和IE(Inertial Explorer)来进行,内业处理流程主要包括数据预处理、数据后处理分类、成果输出。

(1)预处理处理
轨迹解算
在IE里将外业获取到的基站数据和机载数据进行紧耦合差分轨迹解算,解算完成后进行预计位置和姿态的精度检查。当位置精度值小于0.02,姿态精度值小于3时满足精度。
点云解算
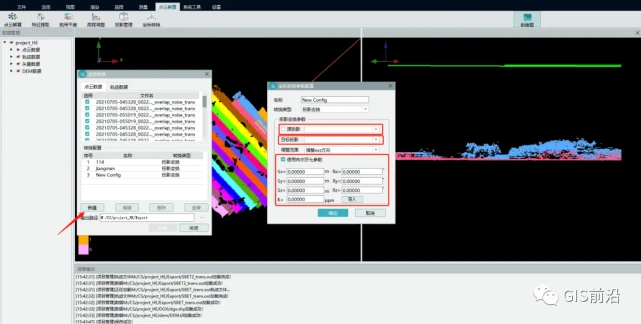
在无人机管家的智激光模块中,用上一步解算好的轨迹文件和下载的激光数据进行点云解算。

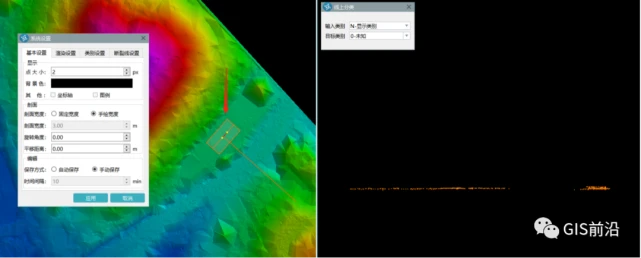
解算后且精度满足后,则进行坐标转换,这里根据项目需求,使用我们外业采集的检查点进行求七参,使用七参进行转换。转换完成后则进行检查点云位置是否正确,是否有悬浮点。
(2)点云后处理
1、去噪、赋色(一般通过正射影像进行赋色,赋色后的点云看起来更加直观)、地面点分类(提取结果只显示两类,一类为地面点,一类为非地面点)、地面点过滤、构建三角网。
2、如果地势差异不大,但类似于“小山包”一样的三角网异常较多,需要重新将地面点分类会0图层,然后进行参数调整后再重新进行地面点分类。

3、手动分类
最基本的方式就是手动进行上分类,主要是把浮点上分类掉,留下地面点(不在山上的凸起“小山包”一般是打在房屋上的点,因为我们只需要地面点,所以这里进行上分类,把它过滤掉)
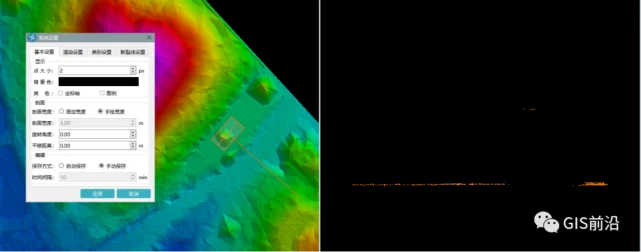
手动分类后,“小山包”就以及消失,如下图(不是正真的删除掉,而是让浮点回到0图层),这步骤需要一点一点进行编辑,最耗时间的一个步骤
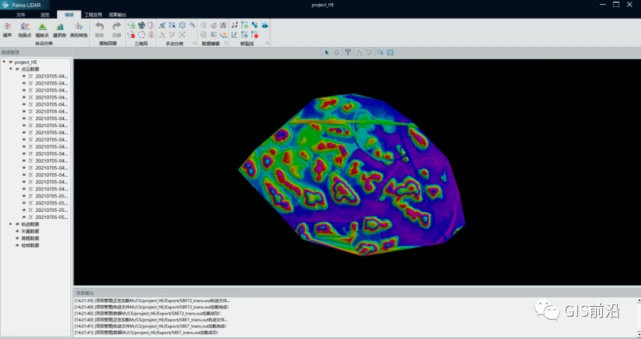
(3)成果输出
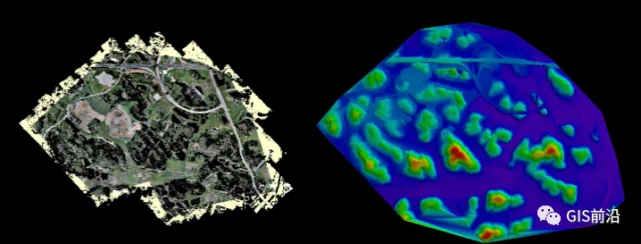
手动分类完成后,我们就可以进行类别提取、高程提取、DEM以及等高线等成果输出,下图为附色分类完成后的点云截图。
成果展示:
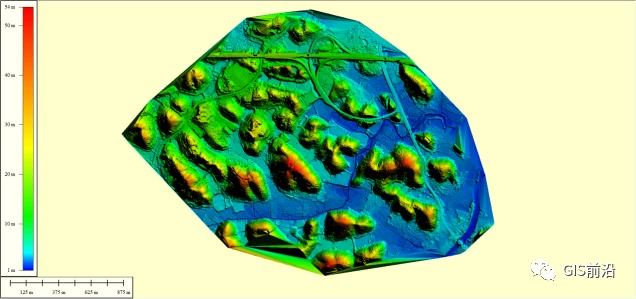
1、DEM成果
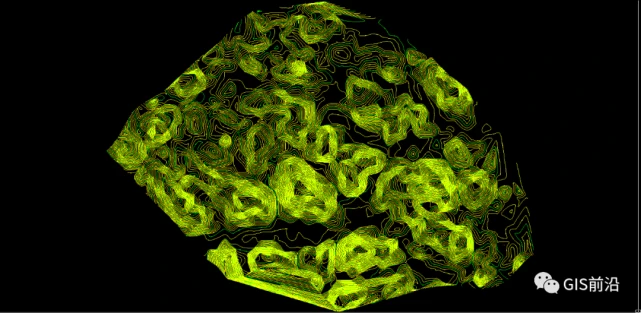
2、等高线

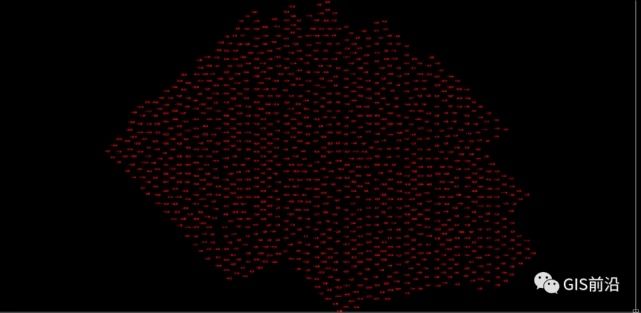
3、高程点
小结
我们通过外业实测与无人机激光雷达航测成图的成果进行精度比对。核查结果显示植被区域平面精度在5cm以内,高程精度10cm以内,其他区域平面高程均在3cm内,满足本项目要求。通过本项目验证确信以飞马D2000为飞行平台,搭载D-LiDAR2000激光雷达,在南方植被茂密的丘陵地区,开展1:1000地形测量工作,是可行的方案。
上一篇:ArcGIS提取DEM中的山脉范围
下一篇:沉降观测如何制定合理的观测路线?











